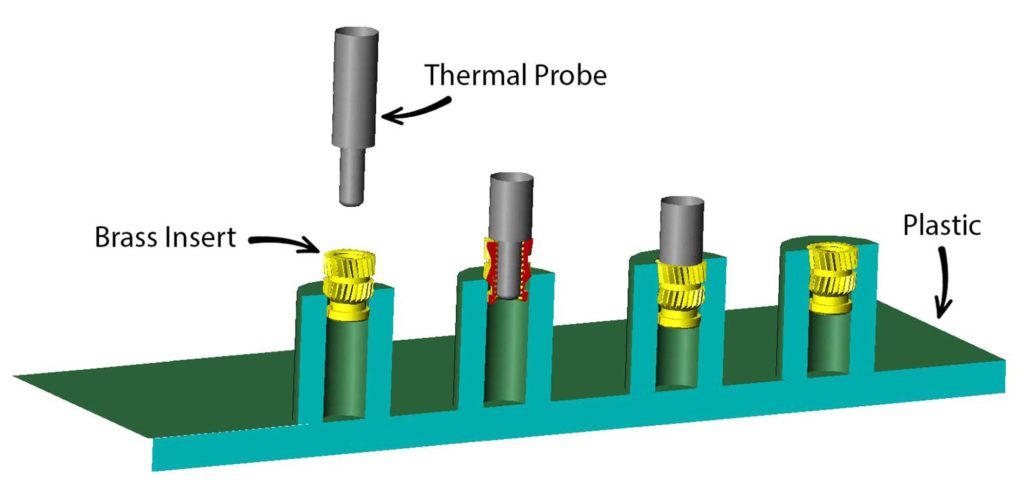
What is a heat-set insert?
A heat-set insert is a small metal threaded sleeve designed to be permanently installed in a plastic part. When heated, it melts the surrounding plastic slightly so the plastic flows around the insert’s knurls. Once cooled, it creates strong, reusable threads that are much more durable than screwing directly into plastic.
╰┈➤ Go to Step 2: Check Your Workspace
Check your workspace first.
When working with heated objects, first make sure your workspace is level and clean. Gather the parts you will be putting heat inserts into, and the heat inserts themselves.
Before You Start: Make sure you are working in a ventilated workspace. Working with soldering irons or heated tools is a burn hazard.
╰┈➤ Go to Step 3: Soldering Iron Setup
Set up your soldering iron.
Set the temperature: Set soldering iron to ~600°F for PETG-CF, the 3D printed filament the arm components are printed in.
Preheat the iron: Allow the soldering iron to fully heat.
╰┈➤ Go to Step 4: Place the Insert
Place the Insert.
Insert the heat-set insert into the hole by hand. The small side of the insert goes into the hole and will fit into place. Ensure it is straight.
Warning: If your heat inserts are not straight, you may end up with crooked threads and assembly may not be possible.
╰┈➤ Go to Step 5: Heat!
Heat!
Place the iron tip of the heated soldering iron on the insert. Apply slow, light pressure as the plastic softens.
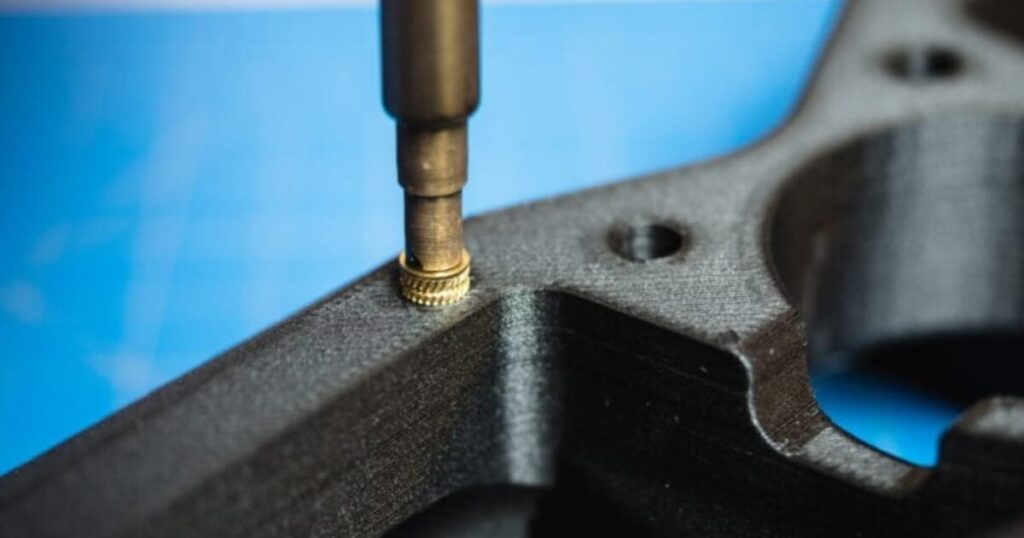
Keep the insert vertical at all times. Stop and realign if it begins to tilt. Press until the insert is just a little below the surface.
📝Why? This is because when the plastic cools down, it pushes the heat insert back up and it will extrude past the surface. You want it to be flat.
When it is done, lift the iron straight up. Do not twist.
📌 Pro Tip: Press a flat metal object (like a hand file) on top of the heat insert as it cools down. Do not install a screw until fully cooled.
╰┈➤ Go to Step 6: Quick Check
Quick Check!
Insert should be straight, flush, and firmly locked in place. Thread a screw a little in by hand to confirm it threads in easily.

╰┈➤ Go to Step 7: Feeling Lost?
Feeling lost?
Watch this video for a great explanation/demo of installing a heat insert using a soldering iron.

Click to watch a short example video.

--
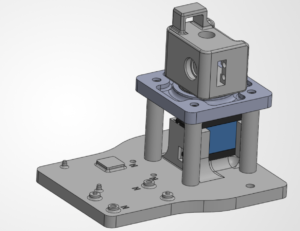
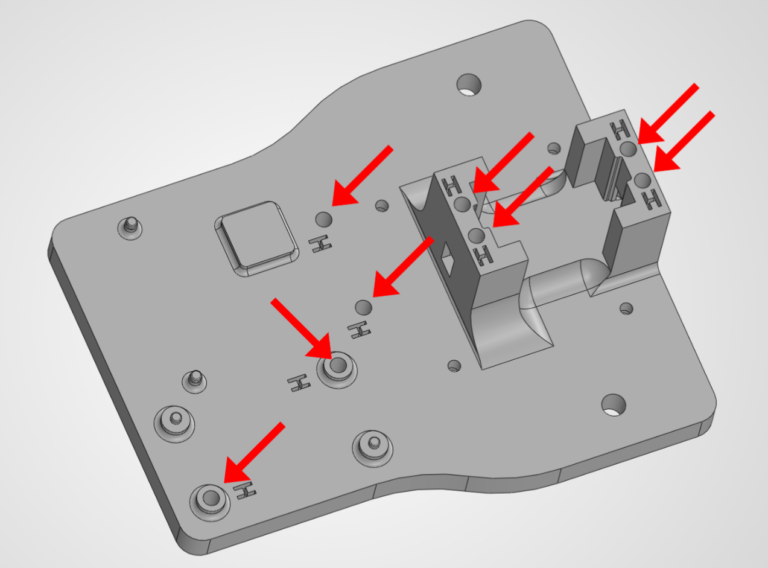
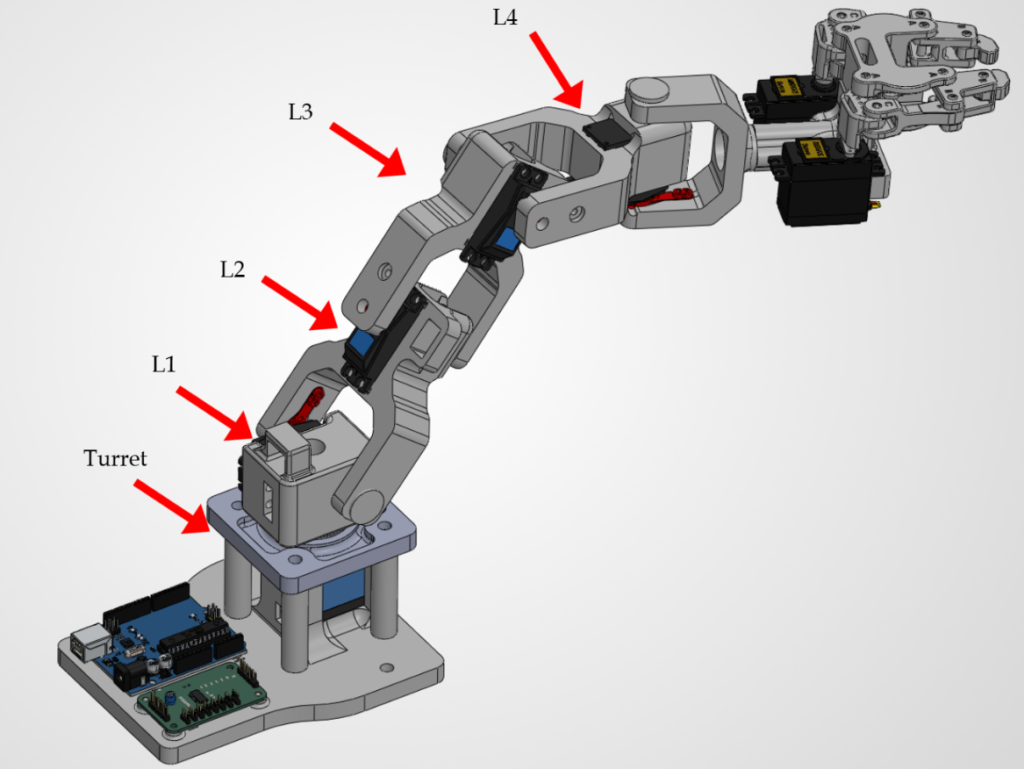
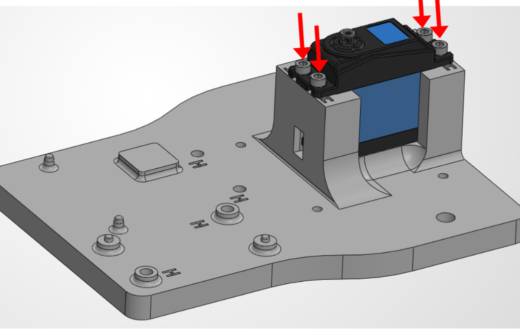
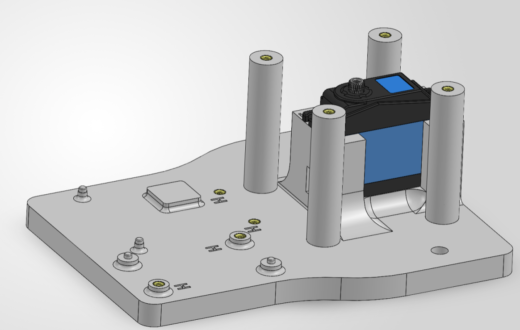
4. Attach the T1 Servo
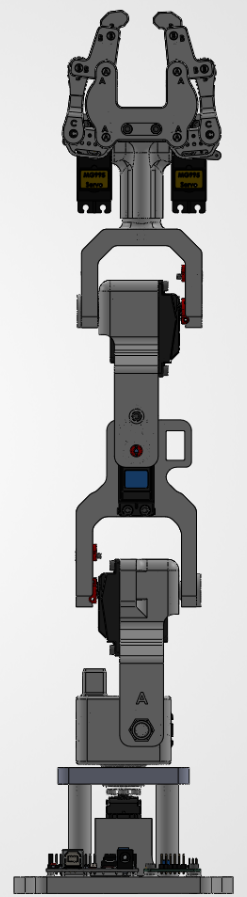
The T1 servo controls the bottom turret of the arm. It's basically the "lazy susan" of the entire arm. Everything rotates around the bottom turret joint.
 Needed Parts: Base Plate (1x), 20 kg-cm Servo (1x), M3 Washers (4x), M3 Bolts (4x)
Needed Parts: Base Plate (1x), 20 kg-cm Servo (1x), M3 Washers (4x), M3 Bolts (4x)
What is Mechanical Engineering/Design?
Mechanical engineering is all about creating motion and manipulating it. That's it. Nothing else. P.S.: You're signing up for long term pain and suffering. See below for a real world scenario.
╰┈➤ Go to Step 2: Creating Motion
Engineers typically use motors to create motion. A motor is a device that turns electricity into motion, making things spin or move. In our robot arm, we use servo motors. What is a servo motor, and how do we know which one to use? A servo motor is a motor designed for precise control. Instead of just spinning freely, a servo lets you say:
- “Go to this exact position”
- “Hold this angle”
- Sometimes: “Move at this speed or with this force”
- A DC motor
- A gearbox (for torque)
- A position sensor (usually a potentiometer)
- A control circuit that listens to a signal and corrects itself
- Precise positioning (arms, flaps, valves, joints)
- Repeatable motion
- Holding a load in place without drifting
- High-speed continuous rotation (unless it’s a special type)
- Very high torque without gearing
- Standard positional servo (most common)
- Range: usually 0–180° or 0-270°
- You tell it an angle
- Example uses: robotic arms, levers, steering
- Continuous rotation servo
- Spins like a DC motor
- No position control
- Signal controls speed + direction
- Example uses: wheels, conveyors
- How much torque do you need?
Torque = force × distance from shaft
Example:
- 1 kg load
- 5 cm arm → Needs ≥5 kg·cm torque (and you want margin — 2× is smart)
- How far does it need to rotate?
- 90° / 180° → standard servo
- 270° → special extended-range servo
- Unlimited rotation → continuous servo or motor + encoder
- How fast should it move?
- 0.12 sec / 60° (for example)
- More expensive
- Less torque
- More power draw
- How accurate does it need to be?
- Plastic gears → cheaper, noisier, less precise
- Metal gears → stronger, more accurate, longer life, more expensive
- Digital servos → better holding torque and precision
- What can power and control it?
- Run on 5–8V
- Controlled by a PWM signal (Arduino-friendly)
| Use Case | Servo Type |
| Robot arm joint | Metal gear positional servo |
| Steering wheels | Standard 180° servo |
| Drive wheels | Continuous rotation servo |
| Heavy load | High-torque digital servo |
| Precision robotics | Encoder-based or digital servo |
- Jitter
- Overheating
- Stripped gears/horn teeth
- Weird “software bugs” that are actually power issues.
- What you’re moving
- How heavy it is
- How far from the shaft
- How fast it needs to move
╰┈➤ Go to Step 3: What is Torque?
Torque is how strong something can twist or turn. When you push a door near the handle instead of the hinges, it’s easier because you’re using more torque. Motors need enough torque so they can move things without getting stuck or stopping.
“Give me a lever long enough and a fulcrum on which to place it, and I shall move the world. ”
― Archimedes
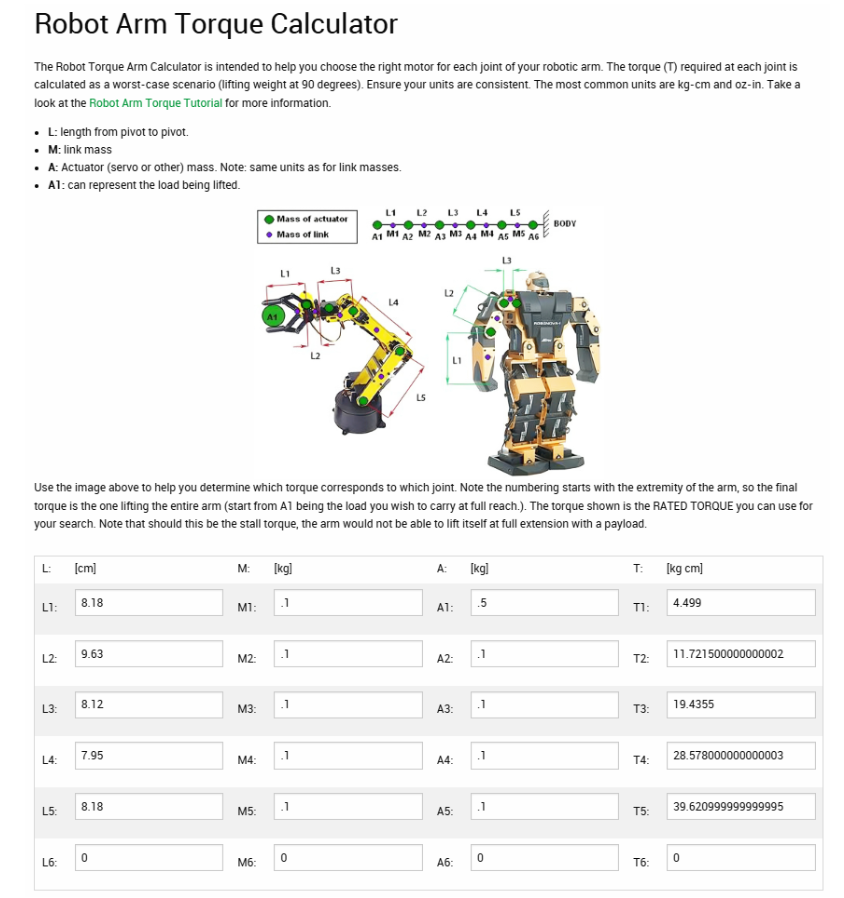
Here is an open source calculator to do the math for you. You can see that we need ~40 kg*cm of torque for a 1 lb claw + load given the weights and linkage lengths provided. This is what's used in your robot arm!
Click "Robot Arm Torque Tutorial" for the math behind it!
╰┈➤ Go to Step 4: Controlling Said Motion
Mechanical engineers manipulate motion by changing how fast something moves, how strong it is, and which direction it goes, using parts like gears, levers, belts, springs, and motors.
For example, check out the claw of our arm. There is a spring attached from the main "palm" to each fingertip. This spring ensures that the fingers always return to it's pulled back/default starting position after you bend it by turning the individual finger servos with code.
On a bicycle, your legs create motion, and gears manipulate that motion by changing how fast the wheels turn and how hard it is to pedal. Low gears make it easier to climb hills, and high gears make you go faster.
A car uses gears and brakes to control speed, direction, and stopping—this is manipulating motion.
When you're trying to manipulate motion, think about how systems in the real world do it! For example, think about a bird. Birds change how their wings are shaped while flying. They spread feathers to slow down and pull them in to speed up or glide.
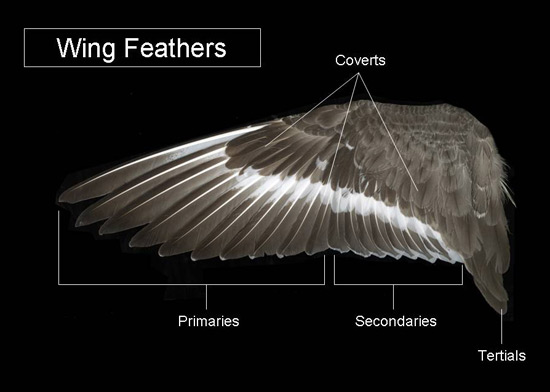
Engineering result:
Airplanes copied this idea using flaps and slats on their wings.

Motion being manipulated:
Speed
Lift
Direction
Why it matters:
Without flaps, planes couldn’t safely take off or land.

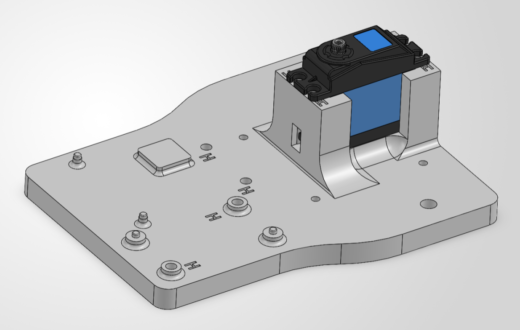
📌 Pro Tip: If you have a hard time sliding the servo into the housing, you may trim the black material on the edge of the servo.

Warning: DO NOT CUT THE WIRES.
--
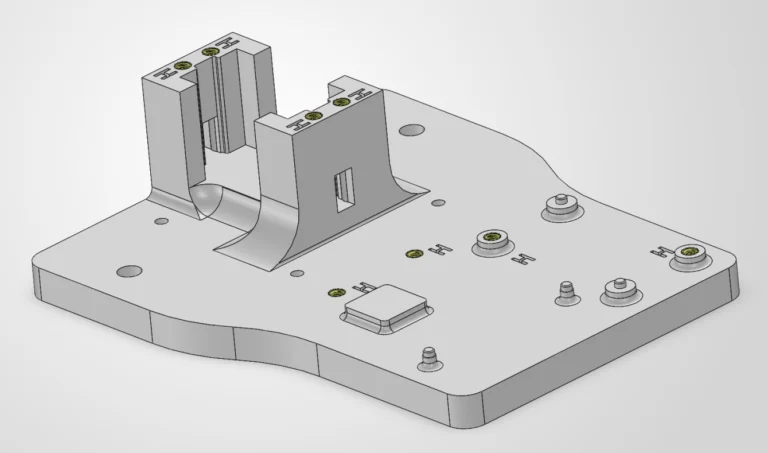
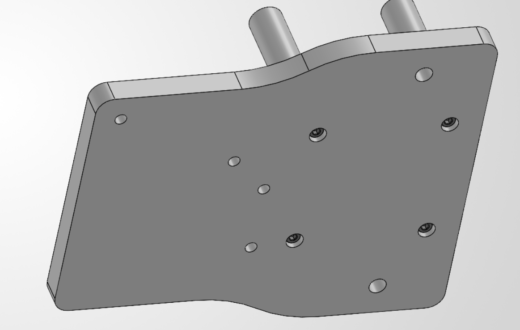
5. Attach the Standoffs to the Base
The standoffs separate two plates at a specific length and holds them together.
Needed Parts: Base Plate (1x), Standoffs (4x), M3 Bolts (4x)
--
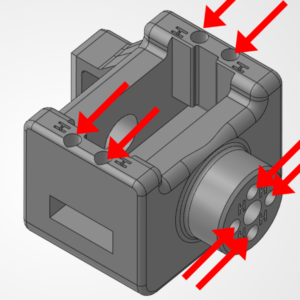
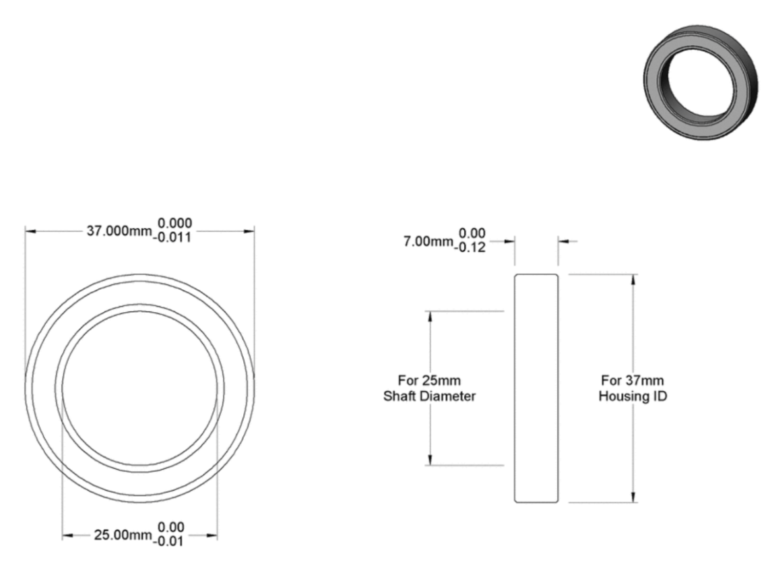
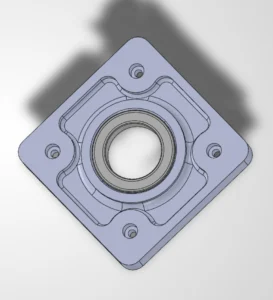
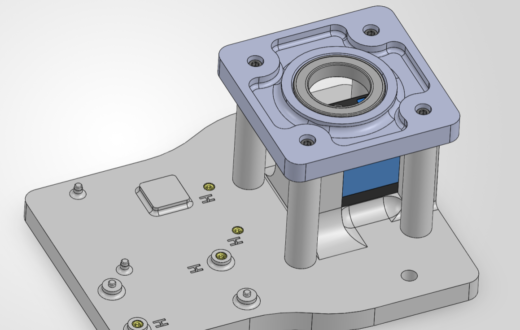
6. Attach the Large Bearing
The large bearing provides axis support for the entire arm when it spins on the lower turret.
Needed Parts: Base Plate (1x), 6805-2RS Large Bearing (1x), Square Plate (1x)
📝
What is a bearing?
Bearings are small parts, but they do a huge job in machines. Their main purpose is to reduce friction (that rubbing that slows things down) and help moving parts spin smoothly without wearing out fast or falling off axis.
A skateboard is a perfect example. Inside each wheel are bearings that let the wheels spin freely and stay lined up. Without them, the wheels would grind, wobble, or slow down unevenly. Imagine trying to skateboard when one wheel spins fine and another barely moves...you wouldn’t get very far. ☠️ Almost everything that rotates on an axis needs a bearing.

--
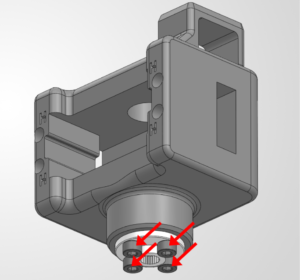
7. Attach the Square Housing
We need to attach the square housing to the standoffs now.
Needed Parts: Base Plate (1x), Square Plate (1x), M3 Bolts (4x)
--
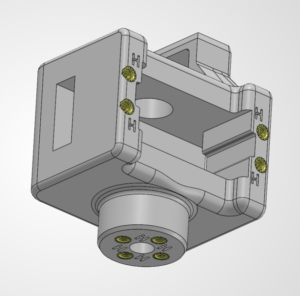
8. Attach the Servo Horn to the L1 Housing
The circular servo horn will eventually attach to our servo motor. But we need to attach it to the next joint of our arm first!
Needed Parts: L1 Housing (1x), Circular Servo Horn (1x), M3 Bolts (4x)

Navigate to this link to download the Arduino IDE software. This software is crucial to programming your robotic arm:
Scroll down until you see this menu. Click the teal Download button on the right side.

To install on:
- Windows: Open the
.exe, click Next until it’s installed. If it offers USB drivers or asks to run Java, say yes. - Mac: Open the
.dmg, drag Arduino IDE into Applications. - Linux: Follow the download page instructions for your distro (or use your package manager if you know what that means).
Plug your Arduino into your computer's USB port using the included cable. It should light up! 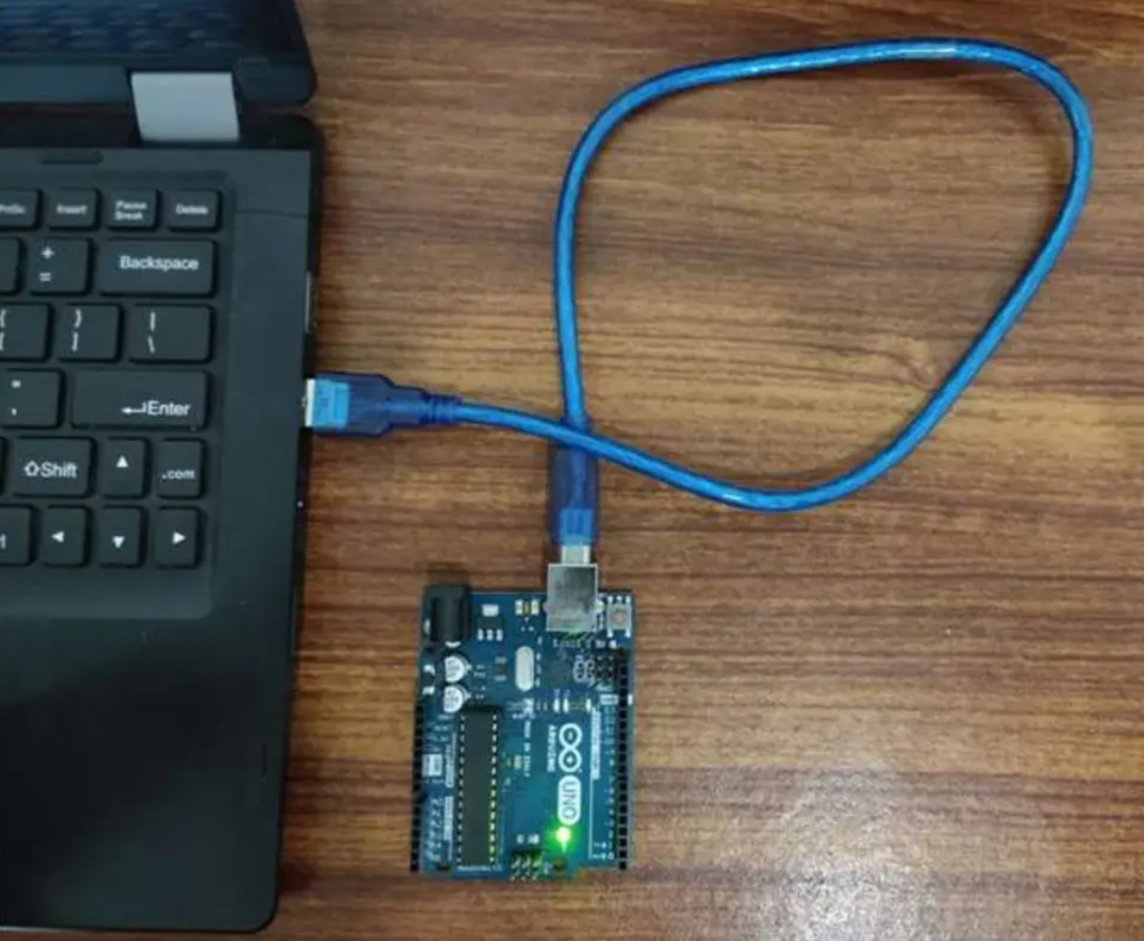
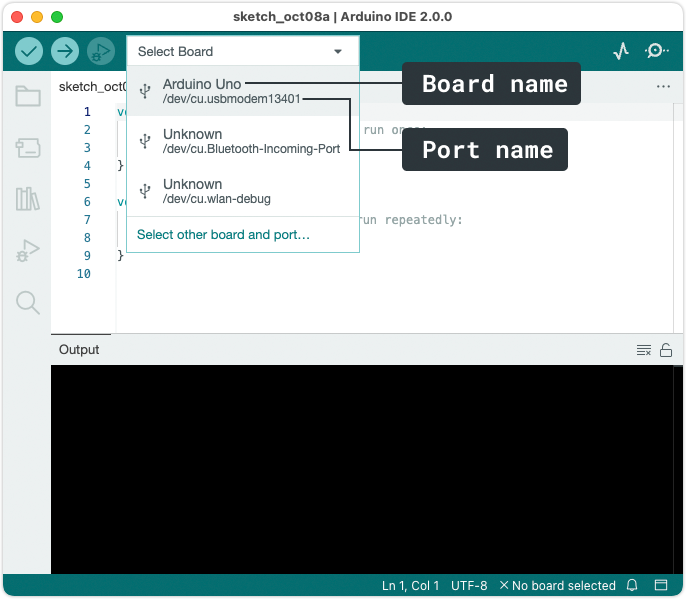
Select your board and port.
In Arduino IDE:
Find the board selector and click to open.
A list of ports will be displayed. If a board could be identified, the board name will be displayed, otherwise, it will display “Unknown”.
- Tools → Board (pick Arduino UNO)
- Then Tools → Port (pick the port that appeared when you plugged it in)
Yay! We can finally test it!
Open: File → Examples → 01.Basics → Blink.
Click Upload. If the LED on the Arduino blinks, congrats...you are now legally allowed to say “hello world.”
Why set the servo position?
Check your components.
You should have your Arduino, Arduino Cable, Test Cable, Power Supply, Power Supply Adapter Head, and Robot Arm Base all within easy reach. Your Arduino and Power Supply should both be unplugged at this time.
Before You Start: Make sure all power is OFF before connecting or adjusting any components. This step involves live electrical connections. Double-check wiring, move slowly, and keep hands clear when power is applied.
╰┈➤ Proceed to Section 3: Set The Power Supply.
Plug in the power supply.
When plugging in the power supply for the first time, you will need to set the voltage.
1. Plug in the power supply to a normal wall outlet.

2. Turn the knob on the power supply until you hear a click. After a moment, the supply should come online. You will see the screen light up and show ~3.12V.

3. Slowly, slowly, begin turning the knob to increase the voltage. The servos in this kit run at 6V or less. You want to set the power supply to just under 6V.

📌 Pro Tip: This is not an exact art! You want this number to be as close to 6V as you can, but if it's a little under (like mine at 5.97V), that is totally okay.
4. After the voltage is set, unplug the power supply from the wall & let it turn fully off. DO NOT TURN THE KNOB TO TURN IT OFF. The screen will go dark after several seconds.
Warning: The power supply voltage knob is very sensitive. Be careful bumping it when using the arm. Setting the voltage above 6V can cause serious damage to the components.
╰┈➤ Proceed to Section 4: About Servo Wires.
A little about servo wires.
Warning: The power supply and Arduino should both be off and unplugged before proceeding.
Every servo has three wires, and each one has a job.
Brown or Black = Ground
Red = Power
Orange / Yellow / White = Signal (PWM)
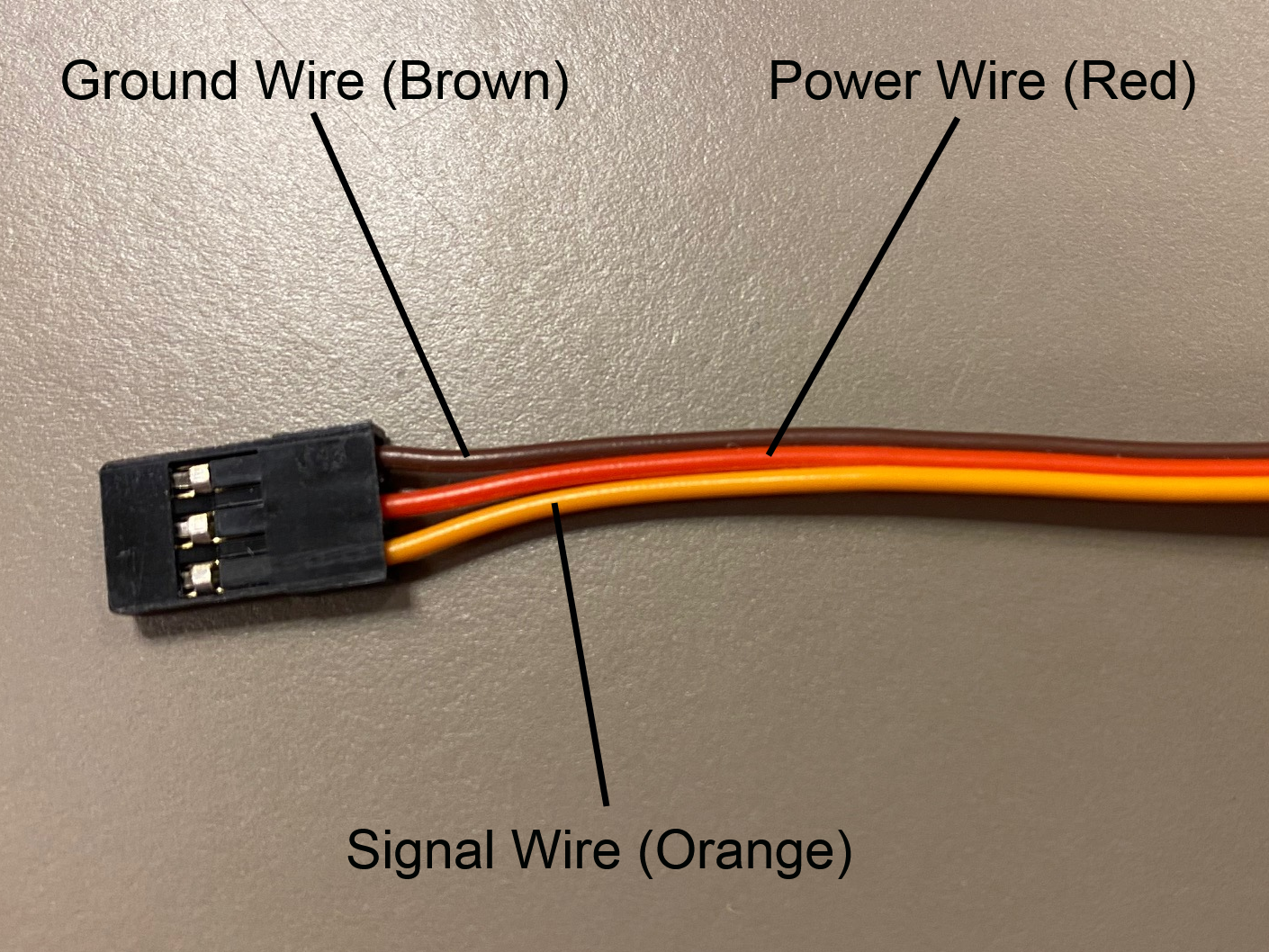
Let’s walk through what each one does and where it goes.
1. Servo Ground Wire (brown or black)
This servo wire will go to ground.
- This goes into GND on the Arduino...
- AND into ground on your 6V power supply.
Why both?
Because electronics need a shared reference point. Think of ground like “zero” on a ruler. If the Arduino and the servo don’t agree on where zero is, the signal makes no sense.
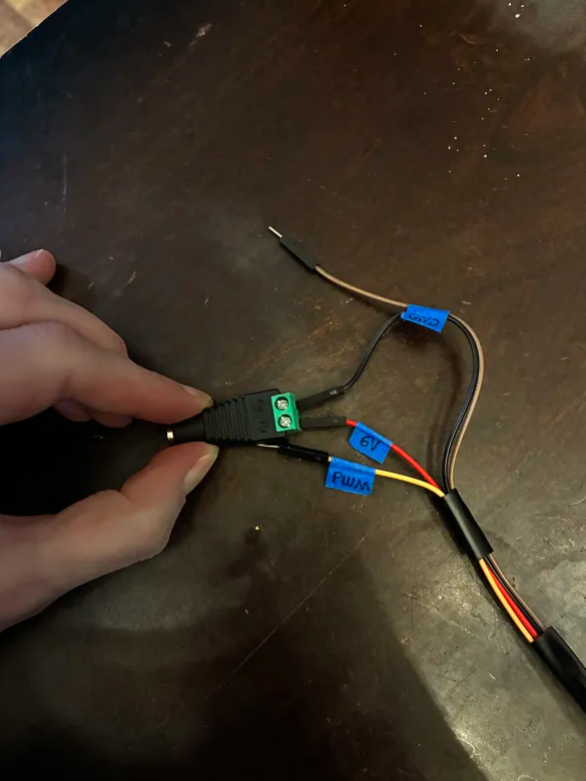
📌 Pro Tip: Your Test Cable has each wire already labeled.
2. Servo Power Wire (red)
This wire actually powers the motor inside the servo.
- This will go into the 6V power supply's positive rail.
- This should NOT be plugged into the 5V pin on the Arduino.
📝 Why? Servos pull a lot of current, especially when they start moving or hit resistance. Powering them directly from the Arduino can cause resets, glitches, or the Arduino quietly giving up on life.
3. Servo Signal Wire (yellow / orange / white)
This wire goes to any digital pin on the Arduino (for example, pin 9). This wire does not power anything. It just carries PWM instructions.
So what is PWM?
PWM stands for Pulse Width Modulation, which sounds scary but isn’t. PWM is just a way of sending information using time, not voltage.
Instead of changing how strong electricity is, we change how long it stays ON.
📝 What do you mean? Imagine a light switch. You flip a light:
ON → light
OFF → dark
Now imagine flipping it:
ON for a short time
OFF for a long time
ON again
OFF again
If you flip the light very fast, the light looks dim. If you keep it ON longer each cycle, it looks brighter. That idea of ON time vs OFF time...is PWM. The Arduino just does it way faster than we humans can process.
The Arduino basically sends the servo a repeating electrical pulse, about 50 times per second. The length of each pulse tells the servo what angle to move to. A short pulse says to move one way, a medium pulse says to go to the middle (90°), and a long pulse moves the other way.
Think of it like Morse code for motors.
╰┈➤ Proceed to Section 5: Wire The Test Bench.
Let's wire the test bench!
Alright! It's finally time to wire our test bench.
1. Connect the 3-wire side of your Test Cable to the T1 servo. The ground wire of your servo should connect to the black wire on the Test Cable. The power wire of your servo should connect to the red wire on the Test Cable. The signal wire on your servo should connect to the orange wire on the Test Cable.

2. On the 4-wire side of your Test Cable, locate the 6V wire and one of the 2 Ground Wires. Screw the 6V Wire into the Positive (+) side of the Power Supply Adapter Head. Screw the GND Wire into the Negative (-) side of the Power Supply Adapter Head.
3. Plug the other GND wire into the GND pin of the Arduino. This is for that shared reference point we talked about in Section 4 - About Servo Wires!
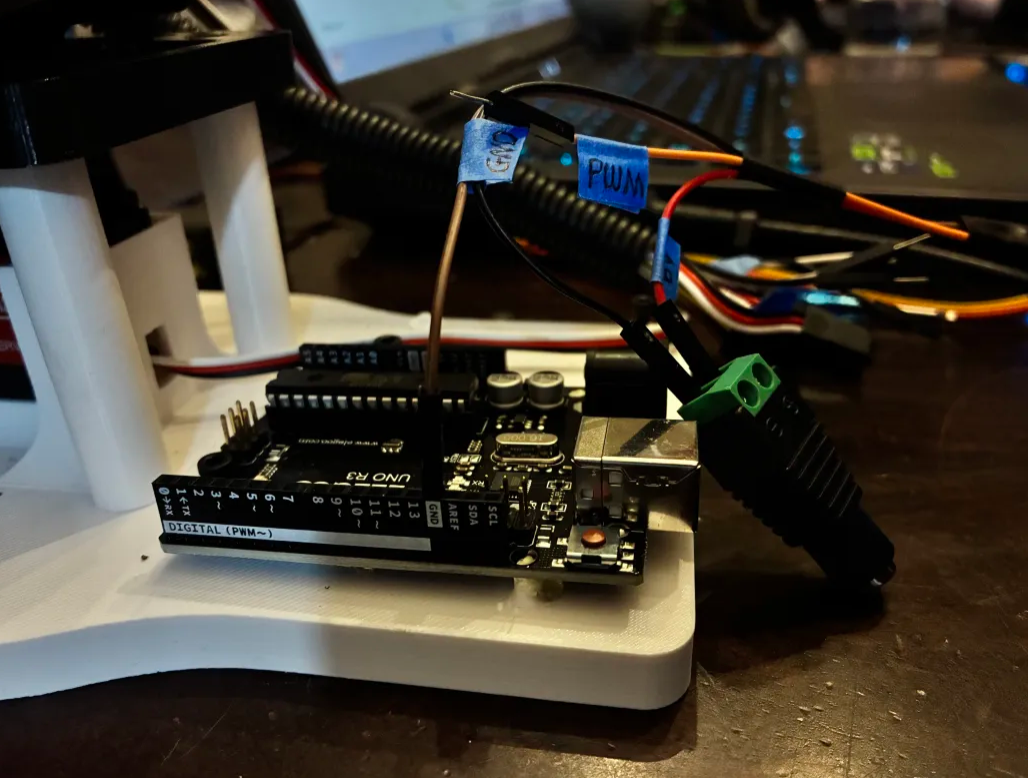
4. Plug the PWM wire into Pin 9 of the Arduino. You could use any digital pin on the Arduino for this, but the code following this will reference Pin 9.
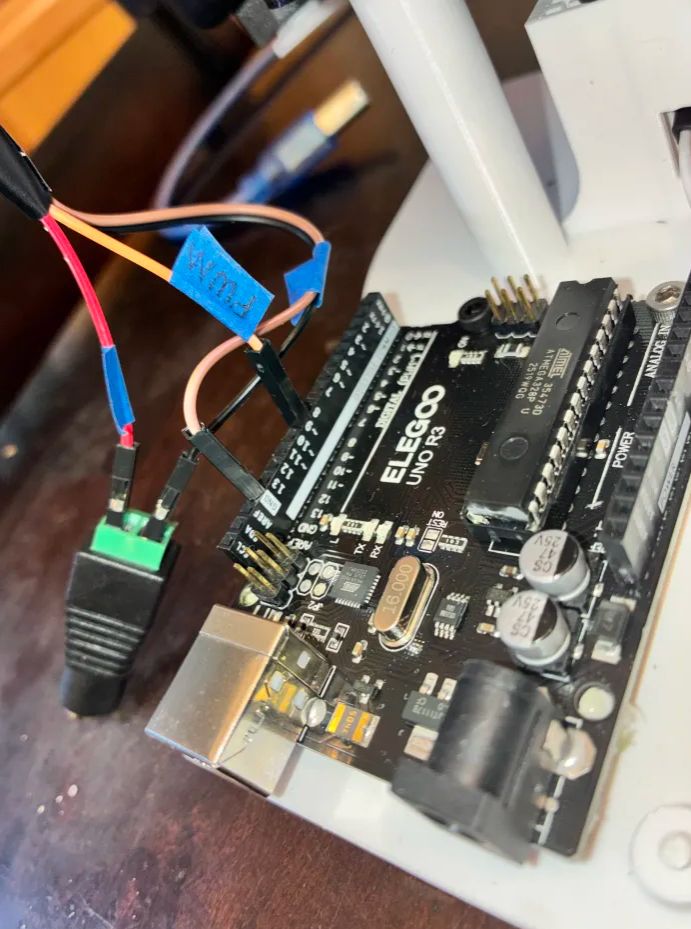
📌 Pro Tip: You could use any of the 13 digital Arduino Pins for this (and it would still work), but the code in this guide will reference Pin 9.
5. All your wires should be plugged in now! Carefully plug the Power Supply output into the Power Supply Adapter Head. 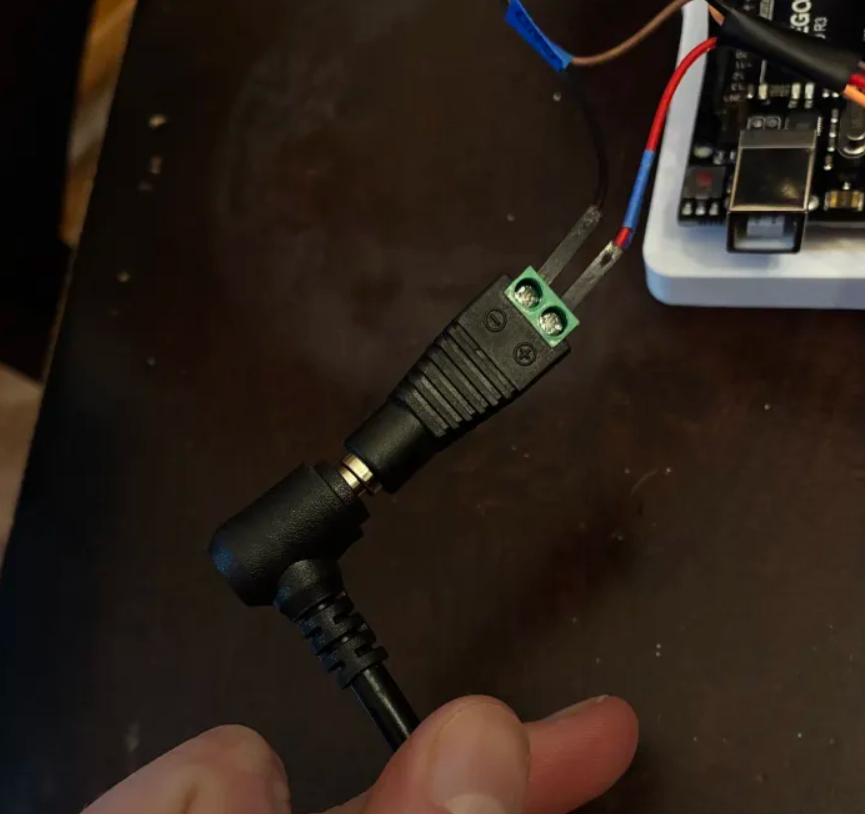
6. Plug your Arduino into your computer's USB port.
7. Plug your Power Supply into the wall. It should kick on to the voltage you set earlier.
Be careful! If you turn on the power supply and see that it has been bumped to a voltage above 6V, immediately turn the knob all the way down. Disconnect the Power Supply Adapter Head and repeat the steps in Section 4 - Set the Power Supply.
Create a New Arduino Sketch
Open Arduino IDE, and make a new sketch. To do this, click File → New. Delete anything in the code editor.
 Some notes before we start: Arduino code is written in C++. You don’t need to know all of C++ yet... you just need to know that Arduino uses it under the hood and hides some of the scary parts so you can focus on making things move.
Some notes before we start: Arduino code is written in C++. You don’t need to know all of C++ yet... you just need to know that Arduino uses it under the hood and hides some of the scary parts so you can focus on making things move.

We’re going to build this program one piece at a time with explanations on how it works and what it does. This program will accept input into a terminal, then make the motor move to a specific position based on the input. If this doesn't make any sense yet, don't worry. It'll all make sense soon.
An Arduino program is built around two special functions:
setup() → runs once
loop() → runs forever
If you understand those two ideas, everything else clicks.

What setup() is really for:
setup() is where you put things that only need to happen once, like:
⬢ Starting communication
⬢ Connecting software to hardware pins
⬢ Setting safe starting positions to energize in
If you put something in setup(), Arduino will:
⬢ Do it once
⬢ Never touch it again unless reset (unplugged and plugged in again)
📝
Why is the function labeled void?
Think of a function like a little helper robot.
You tell the robot:
“Hey, do this job for me.”
There are two kinds of helper robots.
Type 1: The “just do it” robot.
This robot does a job, but doesn’t hand you anything afterward.
Examples:
⬢ Turn on a motor
⬢ Move a servo
⬢ Set up hardware
These robots are labeled void. void means:
“I’ll do the job, but I’m not giving you an answer back.”
They do work, but return nothing.
Type 2: The “do it and tell me the answer” robot.
Some robots do thinking or math and then give you an answer.
For example:
Here, int replaces void.
int means:
“This robot gives back a number. It returns a value.”
The line: return a + b; is the robot saying: “Here’s the answer.”
You can store that answer and use it later:

This gives you the number 7.
But in setup(), we’re not asking for answers. We’re just telling the robot to set things up. So we use void for now.
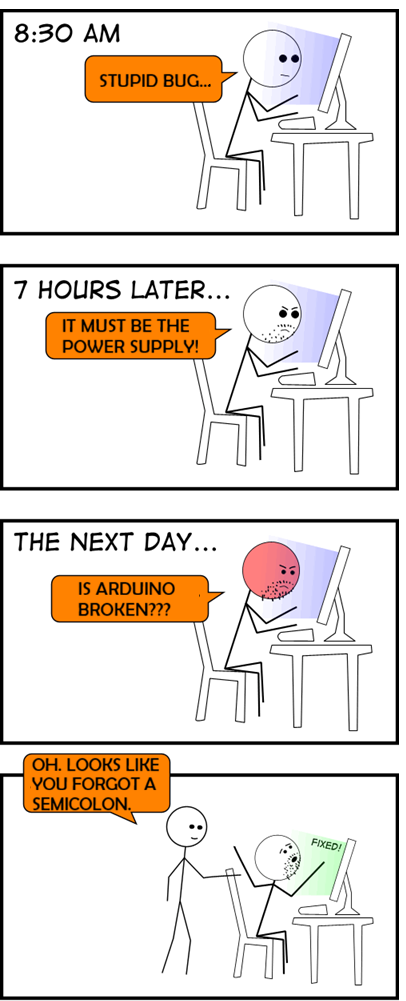
📌 Pro Tip: Don't forget your semicolons when you're coding!
--
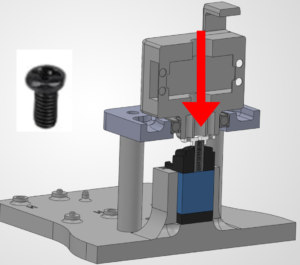
10. Place the L1 Housing
With the servo still energized, we're going to attach the L1 Housing Block!
Needed Parts: L1 Housing (1x), Base Plate (1x), Pinion Screw (1x)